

mit der Software bin ich soweit fertig. Der naechste Schritt ist, mit dem richtigen Motor (ich hatte zum Test einen 24V Typ an 5V) und einem Oszilloskop das Timing der entsprechenden Ablaeufe zu ueberpruefen, sowie die PI Parameter zu optimieren. Auch die Hardware ist mal skizziert. Es wird sich dann herausstellen, ob irgendwelche Stoerungen auftreten (was ich nicht glaube). Ausserdem kann sich das Pinout am Prozessor aendern, wenn ich das Layout mache. Hier mal der vorlaeufige Schaltplan fuer den Regler.
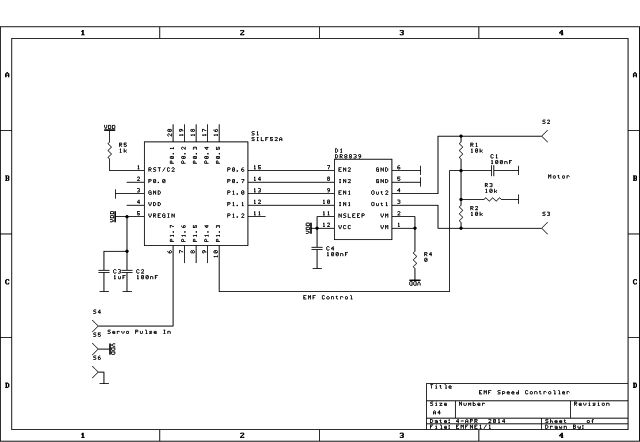
Der Maximalstrom ist laut TI 1.8A; ich wuerde nicht ueber 1A gehen (kein Problem bei eisenlosen Motoren). Die Motorbetriebsspannung ist gleich der Servobetriebsspannung. Wenn man R4 entfernt und R3 veraendert, kann man den Motor bis 11V betreiben. Im Augenblick darf die Servobetriebsspannung nicht ueber 5.5V liegen, sonst muss noch ein Spannungsregler eingebaut/der Pulseingang geschuetzt werden. Ist aber bei mir nicht wichtig, da ich die Anlage an 3.6V betreibe. Wie man sieht, hat der Prozessor noch mehrere freie Pins, bei einer intelligenteren Uebertragung der gesendeten Daten koennte man noch viele Funktionen einbauen.
Regards
