Huch, jetzt habe ich hier schon seit einen Monat nichts mehr geschrieben, obwohl bei mir durchaus keine Funkstille in dieser Sache herrschte.
Ich möchte meine Straßenbahn mit Akku und Funkfernsteuerung betreiben. Dabei ist dann die Steuerung ein Teil des Hobbyprojekts und hat keinen Anspruch auf Erweiterbarkeit auf 50 Fahrzeugen oder dergl. Sie soll nur zuverlässig sein. Zum Einsatz soll "Abfalltechnologie" aus anderen Projekten kommen bzw. wird aus diesem Projekt auch Wissen für andere Projekte gewonnen.
Zunächst dachte ich es mir einfach zu machen und per ESP32 (3 Euro WLAN Web_Server) aus der Bahn Webseiten mit Knöpfen drauf auf ein Handy zu schicken und über diese Knöpfe dann die Bahn zu steuern - das war ein Abfallprodukt aus meinen Flip-Dot Funkuhren. Wenn man eine Uhr stellt, und es gibt durch den übermäßigen Web-Seiten Overhead - oder warum auch immer- Zeitverzögerungen, macht das nichts - bei einer fahrenden Bahn aber schon. Dazu kam noch, dass der ESP32 meine RGBW Neopixel unmotiviert in lustigen Farben blinken ließ, wenn von ihm zu viel WLAN-Betrieb durchgeführt werden musste (ein für diesen Chip in der Fachwelt bekanntes - mir leider unbekanntes - Problem) Also habe ich den ESP32 ad acta gelegt.
Aus einem anderen Projekt lagen da noch ein paar selbst gemachte LoRa Platinen. Die senden in der EU im Frequenzbereich zwischen 863 bis 879 MHz (Bandbreite minimal 125 khz). Die LoRa Funk-Technik für das Internet der Dinge hat mit Entfernungen und Hindernissen kein Problem, was aber durch eine niedrige Datenrate erkauft wird. Aktuell plane ich 8 Byte pro Sendung, was satte 36 ms kostet.
Da die Signale auf freier Fläche durchaus ein paar km weit kommen, sieht die "Fair Access Policy" - also der faire Umgang mit der Frequenzresource - eine maximale Nutzungsdauer pro Sender von 1% vor, was ca. eine Sendung alle 2 Minuten erlauben würde... Wenn ich meine Bahn an Stelle der maximal zulässigen +20 dBm (bzw. maximal 25 mW) mit nur 5 dBm betreibe, störe ich niemanden mehr, den ich nicht kenne - und es wird bei mir ausdrücklich alles nur im "Experimentalbetrieb" kurzzeitig verwendet. Die "Serielle"-Funkstrecke kann man aber natürlich bei Bedarf jederzeit gegen etwas anderes austauschen. Mir ist jetzt erst mal das Aufzeigen der Machbarkeit und die Zuverlässigkeit wichtig.
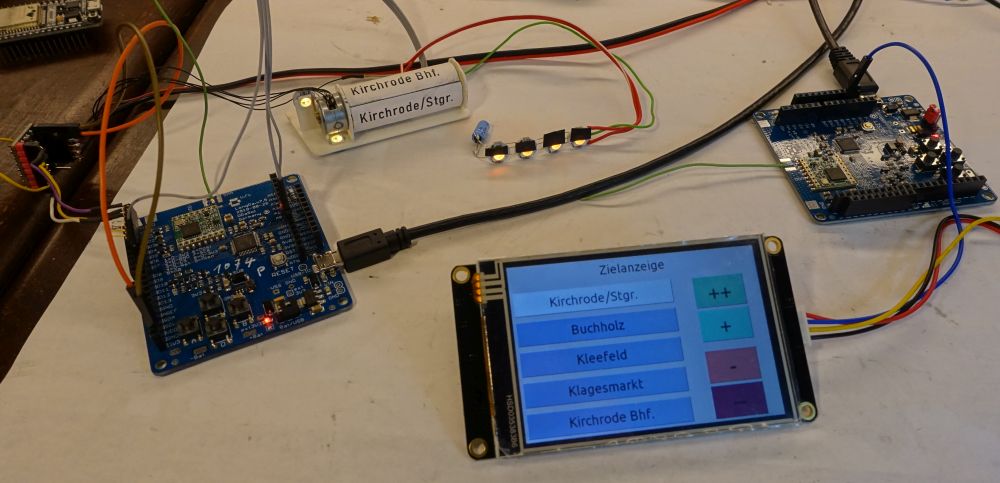
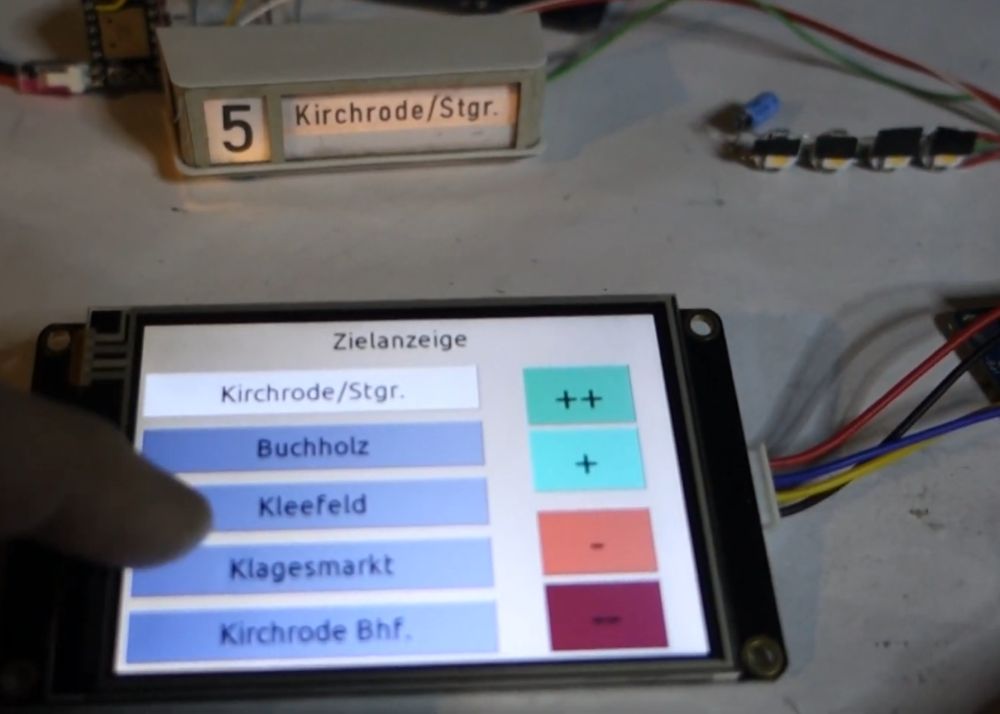
Nach dieser Theorie nun auch gleich die Praxis: So sieht es gerade auf meinem Tisch aus:
Links die blaue Bahnplatine befeuert oben links den Schrittmotortreiber für die Zielanzeige und den RGBW LED Bus. Die einzelnen 4 LEDs in der Mitte werden später in die Blinker integriert (zwei links, zwei rechts). Zwei weitere Schrittmotorentreiber für die 2. Zielanzeige und die zwei Fahrmotoren folgen demnächst.
In der Mitte seht Ihr das Fahrdisplay. Es ist ein 3,5" Nextion Touchdisplay mit 480x320 Pixeln Auflösung. Es wird über eine grafische PC-Oberfläche und einfache Codeblöcke programmiert und steuert sich weitgehend selbst. Es ist nur seriell (2 Daten-Kabel) mit der rechten LoRa Funkplatine verbunden. Dieses Display habe ich auch in meinem Bestückautomat und für meine Brausteuerung verwendet.
Die Logik für die Zielsteuerung im Display ist fertig programmiert und die LoRa Platine unterhält sich bereits mit dem Display. Die Funkstrecke ist auch programmiert. Dieses Wochenende denke ich mir sinnvolle bidirektionale Datenpakete aus, über die auch das Licht und natürlich die Fahrstufen verhandelt werden.