@Henry
Du legst doch bei Deinem Empfänger selbst fest, auf welche Kommandos er hören soll. Bei Pololu sind das schlicht und einfach "GO", um ihn aus der Motorsperre zu holen, "fxxxx" ( x=0..3200 )und "rxxxx", sowie "X" für Stop. Es gibt noch ein paar mehr ( Beschleunigung/Bremsen etc. ), und was hindert Dich, deren Protokoll zu übernehmen, da es sich an die in der Robotik sich 'einschleichenden Standards' anlehnt.
Im 'Simple Motor Controllers Manual' ab S. 58 ist das alles offengelegt.
Eigenentwicklung RC Motorregler
Moderator: Regalbahner
-
ateshci
- Buntbahner

- Beiträge: 210
- Registriert: Di 19. Sep 2006, 11:22
- Wohnort: Friedberg
Re: Eigenentwicklung RC Motorregler
Gruß vom Heizer
-
volkerS
- Buntbahner

- Beiträge: 999
- Registriert: So 1. Apr 2012, 20:12
- Wohnort: Bermersheim
Re: Eigenentwicklung RC Motorregler
Hallo Heizer,
stell doch bitte diese Informationen hier ein oder zumindest den Link zu diesen Infos.
Volker
stell doch bitte diese Informationen hier ein oder zumindest den Link zu diesen Infos.
Volker
-
ateshci
- Buntbahner
- Beiträge: 210
- Registriert: Di 19. Sep 2006, 11:22
- Wohnort: Friedberg
Re: Eigenentwicklung RC Motorregler
Das sind ja erst einmal Überlegungen ins Unreine. Henry entscheidet, wie der Befehlssatz an seinen Umsetzer aussehen soll. Da gibt es in der Robotik auch noch kaum Festlegungen. Ich könnte mir vorstellen, dass einfach die 8-bit DCC-Pakete im Binärformat ( Siehe NMRA-S 9.2.1 ) ohne Präambel usw. über die Sellerie zu senden sein sollten- würde ihm am wenigsten Arbeit machen, weil den Parser dazu hat er sowieso schon im Programm. Die Arbeit auf der Senderseite muss man sich eben selbst machen.
@volkerS
http://www.pololu.com/docs/0J44
@volkerS
http://www.pololu.com/docs/0J44
Gruß vom Heizer
-
Henner (Henry)

- Buntbahner

- Beiträge: 1114
- Registriert: Di 20. Nov 2007, 20:07
- Wohnort: Berlin
Re: Eigenentwicklung RC Motorregler
Heizer,
Frage ist, ob dieses Protokoll fuer alle offen ist. Aber Du koenntest ja mal einen Vorschlag ausarbeiten, den wir hier diskutieren koennen.
Regards
Frage ist, ob dieses Protokoll fuer alle offen ist. Aber Du koenntest ja mal einen Vorschlag ausarbeiten, den wir hier diskutieren koennen.
Regards
Henner (Henry)
Donkey Doktor a.D. EDH Lumber Company
Donkey Doktor a.D. EDH Lumber Company
-
Henner (Henry)
- Buntbahner
- Beiträge: 1114
- Registriert: Di 20. Nov 2007, 20:07
- Wohnort: Berlin
Re: Eigenentwicklung RC Motorregler
Gestern war ich fast fertig mit dem PPM 8-Kanal Regler (Bedienung mit 2 Knueppeln ging schon, nur die Funktionen mussten noch auf entsprechende Pins verteilt werden) als Desaster zuschlug. Durch statische Aufladung zerstoerte ich meine Bruecke. Merke: Betreibe keine Elektronikentwicklung, wenn Du bei extrem niedriger Luftfeuchtikeit in einem Plastikstuhl sitzt und zu faul bist, Deine Antistatikmatte auszubreiten  . Jetzt muss ich halt erst eine der neuen Platinen in Betrieb nehmen, ehe es weitergehen kann.
. Jetzt muss ich halt erst eine der neuen Platinen in Betrieb nehmen, ehe es weitergehen kann.
Regards
Regards
Henner (Henry)
Donkey Doktor a.D. EDH Lumber Company
Donkey Doktor a.D. EDH Lumber Company
-
Regalbahner

- Site Admin
- Beiträge: 4467
- Registriert: Sa 31. Jul 2004, 22:17
- Wohnort: ehemaliger Müritzkreis
Re: Eigenentwicklung RC Motorregler
Hallo Henry,
mein Beileid
Aber es ist schon beruhigend, dass dir sowas auch passiert
Viele Grüße
Christoph
mein Beileid
Aber es ist schon beruhigend, dass dir sowas auch passiert
Viele Grüße
Christoph

-
Henner (Henry)
- Buntbahner
- Beiträge: 1114
- Registriert: Di 20. Nov 2007, 20:07
- Wohnort: Berlin
Re: Eigenentwicklung RC Motorregler
Christoph,
danke fuer Dein Mitgefuehl. Aber meine Dummheit musste halt bestraft werden. Der Chip liess sich uebrigens mit etwas Mikrochirurgie wieder ersetzen. Die Funktionen sind jetzt alle erprobt, ausgenommen die eigentliche Ausgabe der Schaltkanaele, da ich dazu eine Menge LEDs an meinen Testaufbau anloeten muesste. Die Schaltfunktionen werden allerdings richtig empfangen und dekodiert, da ich sie auf einer seriellen Schnittstelle als HEX-Code ausgeben kann. Die Kanalbelegung/Funktion ist identisch mit dem DCC-Konverter: Rechts auf/ab -> Geschwindigkeit, Links auf->vorwaerts, Mitte Nothalt, Links ab-> rueckwaerts. Der Motor ist lastgeregelt fuer ruckfreies Fahren bei geringen Geschwindigkeiten. Ich werde dann demnaechst wieder ein Video einstellen. Da der Prozessor noch genuegend Kapazitaet frei hat, koennte man noch folgende Funktionen einbauen: Blinken fuer ausgewaehlte Funktionen, "Durchreichen" von Servofunktionen (falls der Deltang-Empfaenger die Ausgabe von normalen Servosignalen einstellt, wenn er PPM ausgibt). Weitere Vorschlaege willkommen. Wenn Volker und ich die erste Platine getestet haben, geben wir solch einen kombinierten Fahrtregler/Schaltausgang in Auftrag. Das Ganze funktioniert uebrigens schon mit einer einzigen LiPo Zelle, also ein sehr kompakter Aufbau, da man nur den Deltang (oder anderen PPM faehigen Empfaenger), den Fahrtregler und eine (oder mehrere) LiPo Zellen braucht.
Regards
danke fuer Dein Mitgefuehl. Aber meine Dummheit musste halt bestraft werden. Der Chip liess sich uebrigens mit etwas Mikrochirurgie wieder ersetzen. Die Funktionen sind jetzt alle erprobt, ausgenommen die eigentliche Ausgabe der Schaltkanaele, da ich dazu eine Menge LEDs an meinen Testaufbau anloeten muesste. Die Schaltfunktionen werden allerdings richtig empfangen und dekodiert, da ich sie auf einer seriellen Schnittstelle als HEX-Code ausgeben kann. Die Kanalbelegung/Funktion ist identisch mit dem DCC-Konverter: Rechts auf/ab -> Geschwindigkeit, Links auf->vorwaerts, Mitte Nothalt, Links ab-> rueckwaerts. Der Motor ist lastgeregelt fuer ruckfreies Fahren bei geringen Geschwindigkeiten. Ich werde dann demnaechst wieder ein Video einstellen. Da der Prozessor noch genuegend Kapazitaet frei hat, koennte man noch folgende Funktionen einbauen: Blinken fuer ausgewaehlte Funktionen, "Durchreichen" von Servofunktionen (falls der Deltang-Empfaenger die Ausgabe von normalen Servosignalen einstellt, wenn er PPM ausgibt). Weitere Vorschlaege willkommen. Wenn Volker und ich die erste Platine getestet haben, geben wir solch einen kombinierten Fahrtregler/Schaltausgang in Auftrag. Das Ganze funktioniert uebrigens schon mit einer einzigen LiPo Zelle, also ein sehr kompakter Aufbau, da man nur den Deltang (oder anderen PPM faehigen Empfaenger), den Fahrtregler und eine (oder mehrere) LiPo Zellen braucht.
Regards
Henner (Henry)
Donkey Doktor a.D. EDH Lumber Company
Donkey Doktor a.D. EDH Lumber Company
-
volkerS
- Buntbahner
- Beiträge: 999
- Registriert: So 1. Apr 2012, 20:12
- Wohnort: Bermersheim
Re: Eigenentwicklung RC Motorregler
Hallo Heny,
heute kam Post. Sch...., was hab ich da für Leiterplatten layoutet. Erst jetzt in Realität wird mir bewusst, wie klein die sind.
Sch...., was hab ich da für Leiterplatten layoutet. Erst jetzt in Realität wird mir bewusst, wie klein die sind.
Platinen (volkerS)
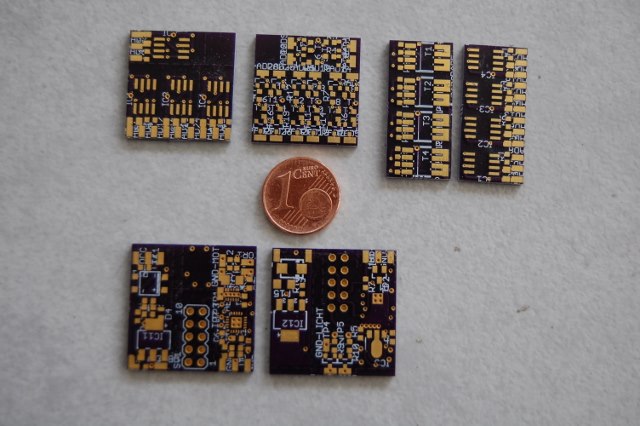
Das Bild zeigt jeweils Ober- und Unterseite:
oben links: RC-4-Kanal-Schalter, daneben RC-2-Kanal-Schalter. Auf jeder Platine je 4 noch zu trennende Einzelplatinen.
Unten die schon von Henry gezeigte Reglerplatine.
Das nächste Bild zeigt zum Vergleich einen RC-4-Kanal-Schalter mit gleicher Funktion.
Vergleich (volkerS)
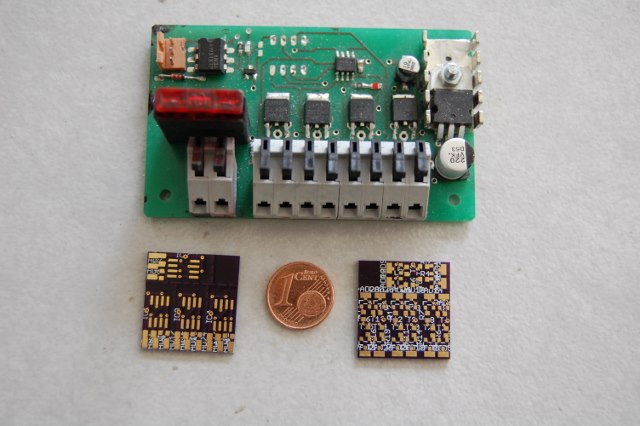
Die große Platine für 5- und 71/4-Zoll hat natürlich einige Zusatzfunktionen:
- Optokoppler zur Trennung vom Empfänger
- Spannungsregler zur Versorgung der Platine ggfs. des Empfängers
- Sicherung
- Federzugklemmen
- Leds zur Funktionskontrolle
Aber leistungsmäßig sind sie gleich. Auch die Miniplatine kann je Kanal mit entsprechenden Transistoren bis zu 2A schalten.
Mit der Lichtschalter-Software können 2x Frontlicht und 2x Rücklicht geschaltet werden, wobei RC-Ausfall bewusst keinen Einfluss hat.
Bei der rechten oberen Platine entsprechend nur 2 Kanäle.
Dafür gibt es auch eine Tast-Funktions-Software, also nur solange der RC-Kanal betätigt wird, schaltet der Ausgang.
Volker
heute kam Post.
Platinen (volkerS)
Das Bild zeigt jeweils Ober- und Unterseite:
oben links: RC-4-Kanal-Schalter, daneben RC-2-Kanal-Schalter. Auf jeder Platine je 4 noch zu trennende Einzelplatinen.
Unten die schon von Henry gezeigte Reglerplatine.
Das nächste Bild zeigt zum Vergleich einen RC-4-Kanal-Schalter mit gleicher Funktion.
Vergleich (volkerS)
Die große Platine für 5- und 71/4-Zoll hat natürlich einige Zusatzfunktionen:
- Optokoppler zur Trennung vom Empfänger
- Spannungsregler zur Versorgung der Platine ggfs. des Empfängers
- Sicherung
- Federzugklemmen
- Leds zur Funktionskontrolle
Aber leistungsmäßig sind sie gleich. Auch die Miniplatine kann je Kanal mit entsprechenden Transistoren bis zu 2A schalten.
Mit der Lichtschalter-Software können 2x Frontlicht und 2x Rücklicht geschaltet werden, wobei RC-Ausfall bewusst keinen Einfluss hat.
Bei der rechten oberen Platine entsprechend nur 2 Kanäle.
Dafür gibt es auch eine Tast-Funktions-Software, also nur solange der RC-Kanal betätigt wird, schaltet der Ausgang.
Volker
-
Henner (Henry)
- Buntbahner
- Beiträge: 1114
- Registriert: Di 20. Nov 2007, 20:07
- Wohnort: Berlin
Re: Eigenentwicklung RC Motorregler
Die Software fuer den PPM Fahrregler + 8-Kanalschalter ist auch soweit fertig. Da ich faul bin, habe ich nur 2 LEDs auf meine Entwicklungsplatine geloetet, aber ich hoffe, ihr glaubt mir, dass die anderen Kanaele auch funktionieren. Das Bild ist sehr aehnlich dem DCC Umsetzer; allerdings faellt hier der DCC Dekoder weg; die Lok wird direkt gesteuert:
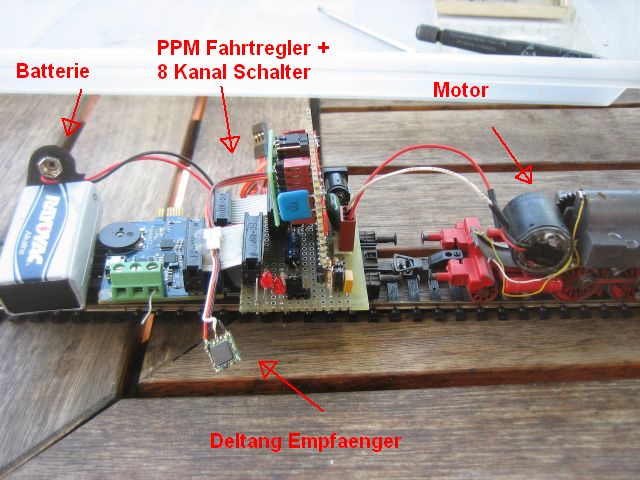
Der Fahrregler wird dann so winzig, wie Volker es in seinem vorigen Beitrag vorgestellt hat. Mit einer Lipo Zelle sollte das in das kleinste Gartenbahnfahrzeug passen. Der Eigenstromverbrauch (Empfaenger + Fahrtregler bei Stillstand) liegt bei 58mA. Der Fahrregler selbst braucht etwa 28mA, wobei auf meinem Entwicklungssystem noch einige "unnuetze" Stromverbraucher sind, die auf unserer Platine wegfallen. Ich rechne dann mit etwa 20mA. Der Deltang Empfaenger "frisst" ca. 30mA.
Als Anhang noch ein Video. Nochmal: Die Lastregelung ist fuer ruckfreie Schleichfahrt/Beschleunigung!
Regards
Der Fahrregler wird dann so winzig, wie Volker es in seinem vorigen Beitrag vorgestellt hat. Mit einer Lipo Zelle sollte das in das kleinste Gartenbahnfahrzeug passen. Der Eigenstromverbrauch (Empfaenger + Fahrtregler bei Stillstand) liegt bei 58mA. Der Fahrregler selbst braucht etwa 28mA, wobei auf meinem Entwicklungssystem noch einige "unnuetze" Stromverbraucher sind, die auf unserer Platine wegfallen. Ich rechne dann mit etwa 20mA. Der Deltang Empfaenger "frisst" ca. 30mA.
Als Anhang noch ein Video. Nochmal: Die Lastregelung ist fuer ruckfreie Schleichfahrt/Beschleunigung!
Regards
Du hast keine ausreichende Berechtigung, um die Dateianhänge dieses Beitrags anzusehen.
Henner (Henry)
Donkey Doktor a.D. EDH Lumber Company
Donkey Doktor a.D. EDH Lumber Company
-
Henner (Henry)
- Buntbahner
- Beiträge: 1114
- Registriert: Di 20. Nov 2007, 20:07
- Wohnort: Berlin
Re: Eigenentwicklung RC Motorregler
Wie waer's mit dem S.Bus?ateshci hat geschrieben:Das sind ja erst einmal Überlegungen ins Unreine. Henry entscheidet, wie der Befehlssatz an seinen Umsetzer aussehen soll. Da gibt es in der Robotik auch noch kaum Festlegungen. Ich könnte mir vorstellen, dass einfach die 8-bit DCC-Pakete im Binärformat ( Siehe NMRA-S 9.2.1 ) ohne Präambel usw. über die Sellerie zu senden sein sollten- würde ihm am wenigsten Arbeit machen, weil den Parser dazu hat er sowieso schon im Programm. Die Arbeit auf der Senderseite muss man sich eben selbst machen.
@volkerS
http://www.pololu.com/docs/0J44
http://www.rcmodelreviews.com/futabasbus.shtml
Scheint nicht mehr "proprietary" fuer Futaba zu sein, da auch andere Firmen Empfaenger/Servos dafuer herstellen. Basiert auch auf einem RS232 aehnlichen Protokoll.
Regards
Henner (Henry)
Donkey Doktor a.D. EDH Lumber Company
Donkey Doktor a.D. EDH Lumber Company